ESP01 and DHT11
When I wrote about ESP01 and relay module this was obvious, that some similar modules should be available. And yes,
Continue readingLearning Arduino

When I wrote about ESP01 and relay module this was obvious, that some similar modules should be available. And yes,
Continue reading
We have ST7796 driven LCD modules. Display has diameter 4″ and resolution 480×320. This module has also resistive touch screen,
Continue reading
First, we are bringing back posts with some interesting projects found on internet. Won’t be much and (of course) we
Continue reading
ArduCam cameras are esy to integrate with ESP8266 or Arduino. But if You need to connect them to ESP32 almost all examples are for ESP32-CAM with hardwired connection. Learn how to connect standalone OV2640 to generic ESP32 board.
Continue reading
When module, sensor has golpins in standard 0.1″ raster as connector the best quick, yet sturdy connection can be made
Continue reading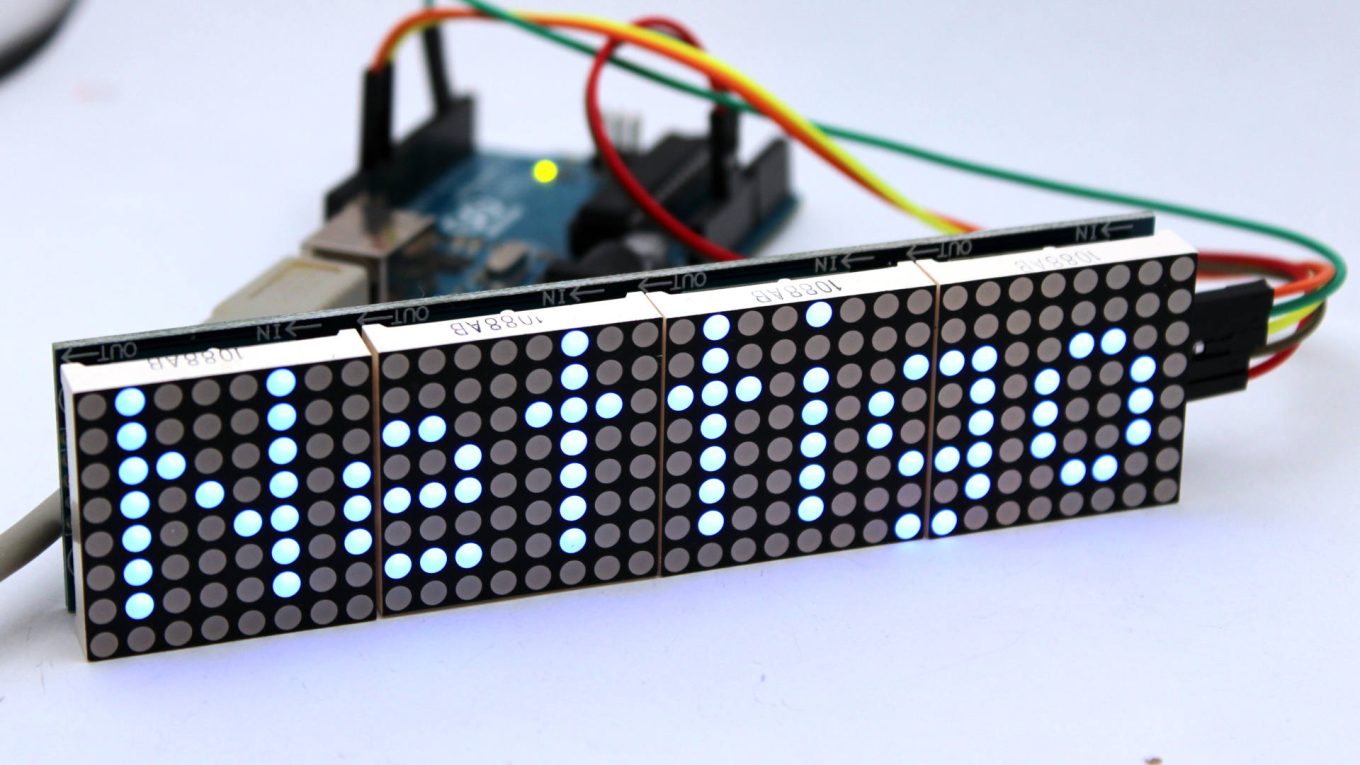
MAX7219 is chip to drive 7seg LED displays. Not just one, but 8 of them. 7 seg – but 8
Continue reading
CO2 level measurement is something You are asking about often. I’d like to add good CO2 sensor to NAM, however
Continue reading
Today we have added new ESP related module to Nettigo offer. It is small relay module for ESP01. Small size,
Continue readingIf you ever wanted to implement some smart solutions in your home but you don’t know/don’t want to write you
Continue readingNanoVNA-H – usefull and reasonable priced vector network analyzer. NanoVNA can be used with desktop application (nano-saver) or phone with
Continue readingStarter Kit is run by